|
I am a Postdoctoral research fellow advised by Prof. Henry Liu (Michigan Traffic Lab) at the University of Michigan, Ann Arbor. I completed my Ph.D. in 2023 from the same lab. I received my Bachelor's degree from the School of Vehicle and Mobility, Tsinghua University in 2018. My research interests revolve around the intersection of automotive engineering, transportation engineering, and artificial intelligence, with a primary emphasis on Connected and Automated Vehicle (CAV) and infrastructure. Specifically, I aim to enhance the safety performance of CAVs through innovative training and testing methods while understanding their impact on human travel behavior when deployed at scale. |

|
News
Selected Publications

|
The high-fidelity simulator is an effective tool for training and testing of autonomous vehicles. However, due to the high dimensionality of real-world driving environments and the rarity of long-tail safety-critical events, how to achieve statistical realism in simulation is a longstanding problem. To address this, we develop NeuralNDE, a deep learning-based framework that can reproduce the naturalistic driving environment with statistical realism, particularly for safety-critical situations. This study has been featured on the journal front page. This study has also been selected as a featured article in Editors' Highlights on "Applied physics and mathematics". The aim of the Editors' Highlights page is to showcase the 50 best papers recently published in an area. - Media coverage: Ann Arbor Observer | University of Michigan | Science Daily | TechXplore | MIT Technology Review China | 量子位 |

|
One critical bottleneck that impedes the development and deployment of autonomous vehicles is the prohibitively high economic and time costs required to validate their safety in a naturalistic driving environment, owing to the rarity of safety-critical events. Here we report the development of an intelligent testing environment, where artificial-intelligence-based background agents are trained to validate the safety performances of autonomous vehicles in an accelerated mode, without loss of unbiasedness. This study has been selected as the Nature journal cover of the March 23, 2023 Issue. - Media coverage: Wall Street Journal | Nature News & Views | Nature Podcast | Nature Video | NSF | CCAT | University of Michigan News | Michigan Engineering |
|
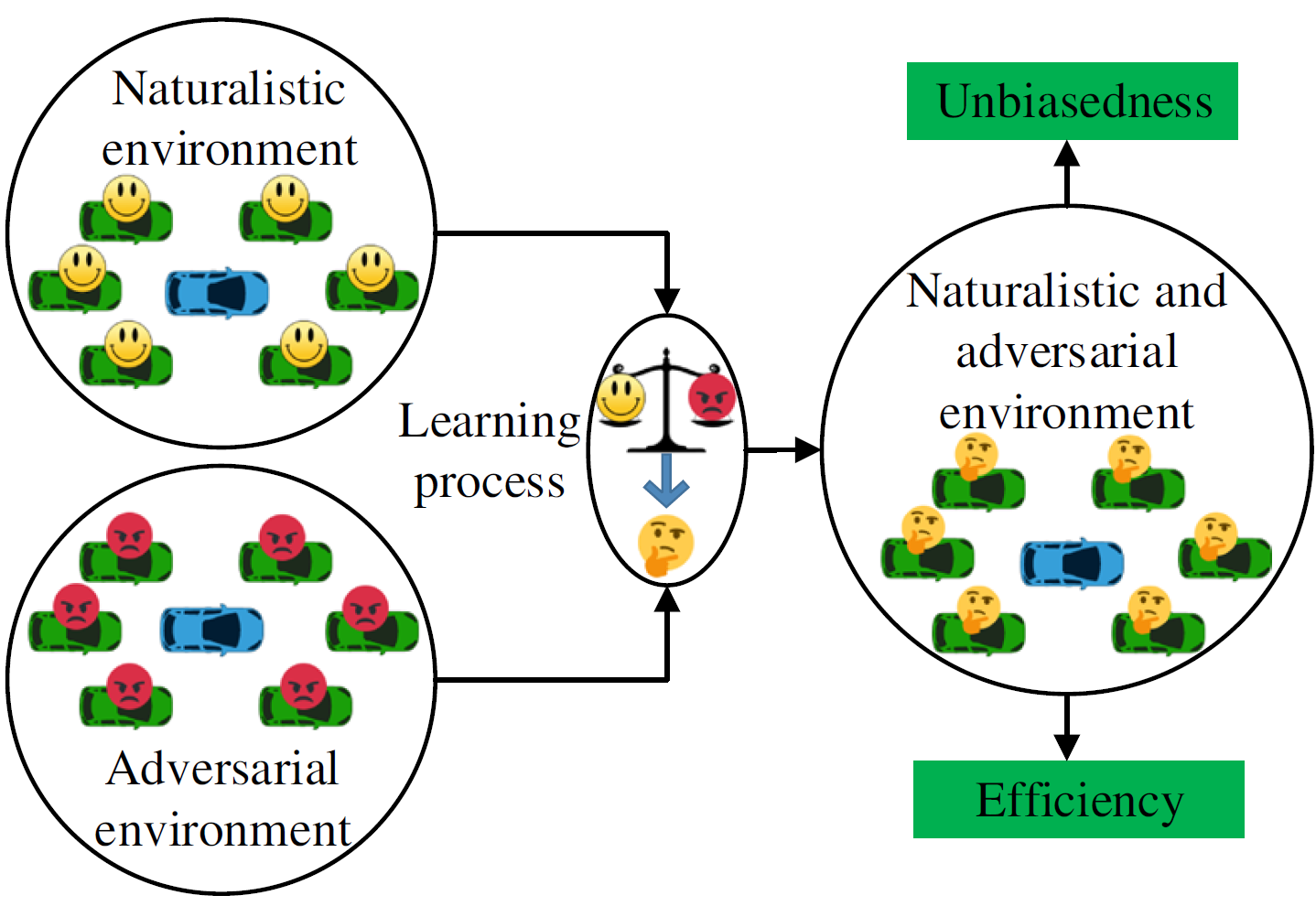
Tests for autonomous vehicles are usually made in the naturalistic driving environment where safety-critical scenarios are rare. We propose a testing approach combining naturalistic and adversarial environment which allows to accelerate testing process and detect dangerous driving events. This study has been selected as a featured article in Editors' Highlights on "AI and machine learning". - Award: (SIG) Outstanding Paper in Intelligent Transportation Systems - Media coverage: CCAT | University of Michigan | TechXplore | Sohu |
Teaching
| Co-instructor of CEE 551: Traffic Science, University of Michigan, Ann Arbor, Fall 2023 |
| Co-instructor of CEE 551: Traffic Science, University of Michigan, Ann Arbor, Fall 2022 |
| Graduate Student Instructor of CEE 450: Introduction to Transportation Engineering, University of Michigan, Ann Arbor, Winter 2021 |
Academic Service
| Professional Organization: Member of the SAE On-Road Automated Driving (ORAD) Verification and Validation Task Force |
| Reviewer: IEEE T-ITS, IEEE T-IV, Transp. Res. Part C, ISTTT |
| Program Committee: ICRA 2023 Scalable Autonomous Driving (SAD) Workshop |
| Other: Editorial assistant of the Journal of Intelligent Transportation Systems |
Misc
|
Build based on this website. |